Week 2 & 3 :
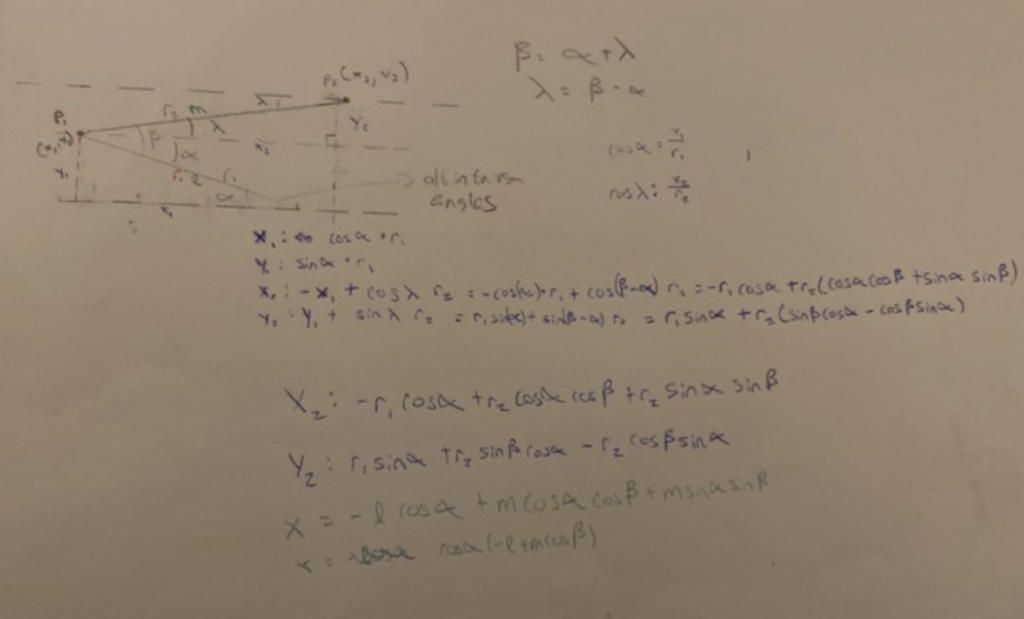
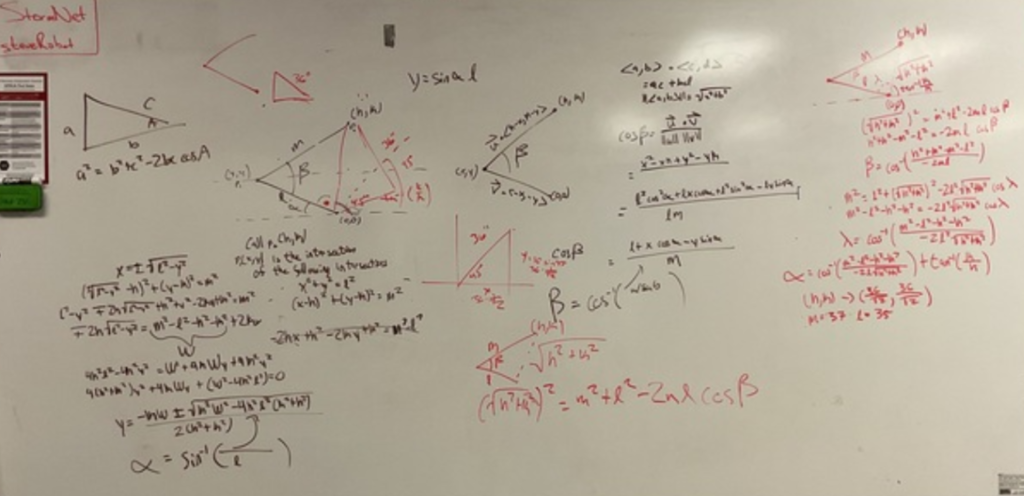
Arm: The calculations for this arm were started this week. These were used to find the x and y coordinates of the gripper based on the angles:

On 1/15, software had a group meeting to outline all jobs and distribute the work among the team. We broke down critical tasks such as,
- Drive, including swerve and mecanum
- NavX, for balance command
- Arm
- Vision (including servo)
- Lights
- Misc. Sensors
- Can devices
- Pneumatic Gripper
- Joystick / Button Board
Joysticks:
This week we used a basic Logitech Joystick like in the offseason, but it quickly became evident with the number of commands that are necessary on the field this season, that a button board would be more efficient.
Pneumatics:
This week, multiple ideas were proposed for the gripper, and the ultimate victor was a gripper equipped with a pneumatic piston. On January 20th, the software and electrical teams collaborated to design the pneumatics system, settling on a configuration that commenced with a compressor and led to two solenoids responsible for opening and closing valves to redirect pressure. The initial solenoid was responsible for an on/off switch, while the second determined the power level of the gripper – either high or low. This decision was made to avoid exerting too much pressure and damaging the cube while still enabling us to pick up a cone. The software team dedicated time to familiarizing themselves with the WPI pneumatics documentation that week.
NavX:
Following the meeting, it became apparent that we needed to develop a balance command for the robot to automatically adjust its position on the charging station. To achieve this, we required a NavX, a tool comparable to a compass, that provides information on yaw, roll, and pitch. We have taken our first step towards implementing NavX by making a commit this week. When executed, this commit will exhibit the yaw, roll, and pitch values on SmartDashboard.