Week 4:
Gyro Command:
The initial work on the Gyro Command was made this week. It used the pitch and roll to determine the tilt of the robot to help it scale the charging station. For example, the greater the tilt, the faster the robot will scale the ramp.
Pneumatics:
In 2019, our team used a pneumatics system to pick up items. Software realized that we could use code similar to this to open and close the gripper in the current season. Today, we imported the code from our Deep Space robot and began editing it for our 2-solenoid setup. The software team decided it would be beneficial to test the pneumatics from now on with an XBox controller, so we decided to set up several instant commands to trigger solenoid actions.
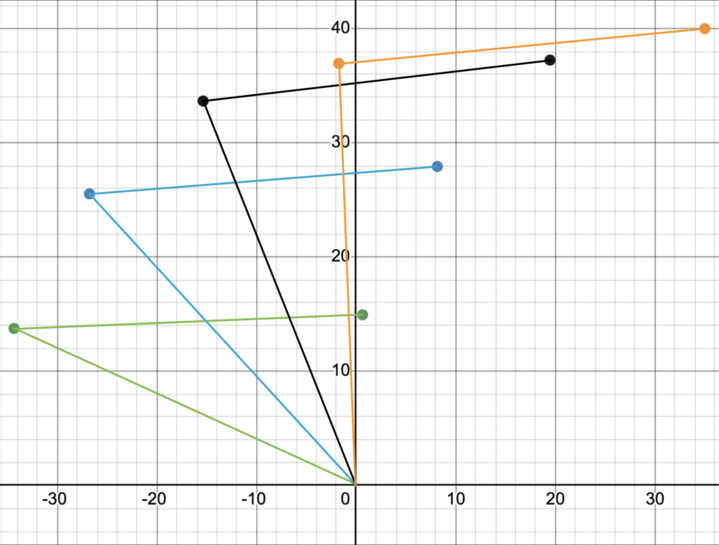
Arm:
Today, software graphed the math for the arm to check if only the speed of the gripper was changing.
Neopixels:
For DeepSpace, we used a tower of neopixels on the robot controlled by the button board to give instructions to our drive team. One color or pattern of colors told the drive team to do a certain thing, or tell them whether it was possible to do something using sensors. We decided to replicate the same thing this year. This week, we familiarized ourselves with the AddressableLED strips and class, and was able to turn the lights on and off and alternate colors.
Drive:
Field Relative Drive was highlighted as a necessity during our reviews. I dmed surya for this ill elaborate on this later